
Pavement roughness is generally defined as an expression of irregularities in the pavement surface that adversely affect the ride quality of a vehicle (and thus the user). Roughness is an important pavement characteristic because it affects not only ride quality but also vehicle delay costs, fuel consumption and maintenance costs. The World Bank found road roughness to be a primary factor in the analyses and trade-offs involving road quality vs. user cost (UMTRI, 1998[1]). Roughness is also referred to as “smoothness” although both terms refer to the same pavement qualities.
For detailed information, the University of Michigan Transportation Research Institute (UMTRI) maintains an excellent Web page on roughness and all related aspects at http://www.umtri.umich.edu/divisionPage.php?pageID=62.
Measurement
Today, roughness is typically quantified using some form of either present serviceability rating (PSR), international roughness index (IRI) or other index with IRI being most prevalent.
Present Serviceability Rating (PSR)
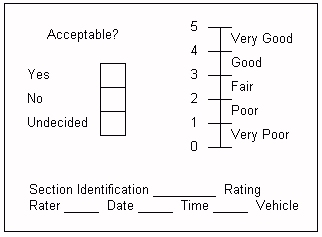
The AASHO Road Test (Highway Research Board, 1972[2]) developed a definition of pavement serviceability, the present serviceability rating (PSR), that is based on individual observation. PSR is defined as “The judgment of an observer as to the current ability of a pavement to serve the traffic it is meant to serve” (Highway Research Board, 1972[2]). To generate the original AASHO Road Test PSR scores, observers rode around the test tracks and rated their ride using the quantitative scale shown in Figure 1. This subjective scale ranges from 5 (excellent) to 0 (essentially impassable). Since PSR is based on passenger interpretations of ride quality, it generally reflects road roughness because roughness largely determines ride quality.
International Roughness Index (IRI)
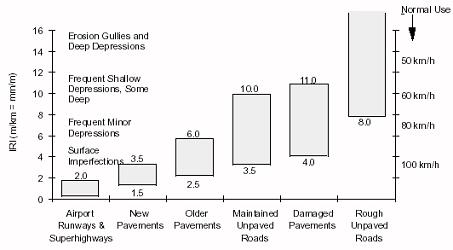
The international roughness index (IRI) was developed by the World Bank in the 1980s (UMTRI, 1998[1]). IRI is used to define a characteristic of the longitudinal profile of a traveled wheeltrack and constitutes a standardized roughness measurement. The commonly recommended units are meters per kilometer (m/km) or millimeters per meter (mm/m). The IRI is based on the average rectified slope (ARS), which is a filtered ratio of a standard vehicle’s accumulated suspension motion (in mm, inches, etc.) divided by the distance traveled by the vehicle during the measurement (km, mi, etc.). IRI is then equal to ARS multiplied by 1,000. The open-ended IRI scale is shown in Figure 2.
Correlations Between PSR and IRI
Various correlations have been developed between PSR and IRI. Two are presented here. One was reported in 1986 by Paterson:
![]() Another correlation was reported in a 1992 Illinois funded study performed by Al-Omari and Darter (1992[3]):
Another correlation was reported in a 1992 Illinois funded study performed by Al-Omari and Darter (1992[3]):
![]()
This study used data from the states of Indiana, Louisiana, Michigan, New Mexico, and Ohio for both flexible and rigid pavements. The associated regression statistics are R2 = 0.73, SEE = 0.39, and n = 332 sections. Correlations are highly dependent upon the data that are used.
Measurement Techniques
The equipment for roughness survey data collection can be categorized into the four broad categories shown in Table 1.
Table 1. Roughness Measuring Equipment
| Equipment / Technique | Complexity |
|---|---|
| Rod and level survey | most simple |
| Dipstick profiler | simple |
| Profilographs | simple |
| Response type road roughness meters (RTRRMs) | complex |
| Profiling devices | more complex |
The following discussion with a few modifications was taken directly from the “Pavement Condition Data Collection Equipment” article in the FHWA Pavement Notebook (1989[4]).
Survey
A survey (performed by a survey crew) can provide an accurate measurement of the pavement profile. The use of surveys for large projects, however, is impractical and cost prohibitive.
|
|
|
Dipstick Profiler
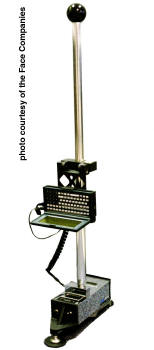
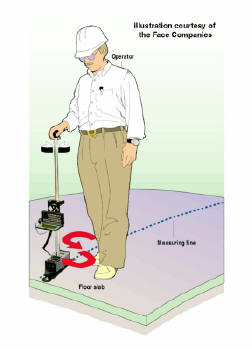
The dipstick profiler can be used to collect a relatively small quantity of pavement profile measurements. The Dipstick Profiler (see Figures 3 and 4) consists of an inclinometer enclosed in a case supported by two legs separated by 305 mm (12 in.). Two digital displays are provided, one at each end of the instrument. Each display reads the elevation of the leg at its end relative to the elevation of the other leg. The operator then “walks” the dipstick down a premarked pavement section by alternately pivoting the instrument about each leg. Readings are recorded sequentially as the operator traverses the section. The device records 10 to 15 readings per minute. Software analysis provides a profile accurate to ± 0.127 mm (± 0.005 in.). A strip can be surveyed by a single operator in about one-half the time of a traditional survey crew. The dipstick is commonly used to measure a profile for calibration of more complex instruments.
Profilographs
Profilographs have been available for many years and exist in a variety of different forms, configurations, and brands. Due to their design they are not practical for network condition surveys. Their most common use today is for rigid pavement construction inspection, quality control, and acceptance. The major differences among the various profilographs involve the configuration of the wheels and the operation and measurement procedures of the various devices.
Profilographs have a sensing wheel, mounted to provide for free vertical movement at the center of the frame (Figure 5). The deviation against a reference plane, established from the profilograph frame, is recorded (automatically on some models) on graph paper from the motion of the sensing wheel (Figure 6). Profilographs can detect very slight surface deviations or undulations up to about 6 m (20 ft) in length.
|
|
|


Response Type Road Roughness Meters (RTRRMs)
The third category of roughness data collection equipment is the response type road roughness meters (RTRRMs), often called “road meters”. RTRRM systems are adequate for routine monitoring of a pavement network and providing an overall picture of the condition of the network. The output can provide managers with a general indication of the overall network condition and maintenance needs
RTRRMs measure the vertical movements of the rear axle of an automobile or the axle of a trailer relative to the vehicle frame. The meters are installed in vehicles with a displacement transducer on the body located between the middle of the axle and the body of a passenger car or trailer. The transducer detects small increments of axle movement relative to the vehicle body. The output data consists of a strip chart plot of the actual axle body movement versus the time of travel.
The disadvantage of a RTRRM is that its measured axle body movement vs. time depends on the dynamics of the particular measurement vehicle, which results in two unwanted effects (UMTRI, 1998[1]):
- Roughness measuring methods have not been stable with time. Measures made today with road meters cannot be compared with confidence to those made several years ago.
- Roughness measurements have not been transportable. Road meter measures made by one system are seldom reproducible by another.
Because of these two effects, profiling devices are becoming more popular.
Profiling Devices
Profiling devices are used to provide accurate, scaled, and complete reproductions of the pavement profile within a certain range. They are available in several forms, and can be used for calibration of RTRRMs. The equipment can become fairly expensive and complex. Three generic types of profiling systems are in use today:
- Straight edge. The simplest profiling system is a straight edge. Modifications to the straight edge, such as mounting it on a wheel, result in a profilograph.
- Low speed systems. Low speed systems such as the CHLOE profilometer are moving reference planes. The CHLOE is a long trailer that is towed at low speeds of 3 to 8 kph (2 to 5 mph). The slow speed is necessary to prevent any dynamic response measurement during the readings. A few agencies still use the CHLOE to calibrate their RTRRMs.
- Inertial reference systems. Most sophisticated road profiling equipment uses the inertial reference system. The profiling device measures and computes longitudinal profile through the creation of an inertial reference by using accelerometers placed on the body of the measuring vehicle to measure the vehicle body motion. The relative displacement between the accelerometer and the pavement profile is measured with either a “contact” or a “non-contact” sensor system.
The earliest profiling devices used a measurement system in direct contact with the pavement to measure profile. Several contact systems have been used, and are still in use today. The French Road Research Laboratory developed the Longitudinal Profile Analyzer (APL) in 1968.
Systems used today in the United States are frequently installed in vans (Figure 7) which contain microcomputers and other data handling and processing instrumentation. Older profiling devices are usually contact systems, while the more recently manufactured devices use non-contact sensors. The non-contact systems use probes, either acoustic or light, to measure differences in the pavement surface. For instance, the South Dakota road profiler simultaneously collects three ultrasonic profiles, one for each wheelpath and one for the lane center. These profiles are used to calculate (by computer) a mathematical measure of roughness and an estimate of rutting at specified intervals along the roadway. A hybridized South Dakota road profiler combines the three ultrasonic sensors with two laser sensors, one for each wheelpath, for simultaneous measurement of the same roadway by two different sensor types under identical conditions (Virginia Transportation Research Council, 1996[5]). Integrated analysis units can continuously collect a wide variety of data at highway speeds such as:
- Transverse profile/rutting
- Grade, cross-slope
- Pavement texture
- Pavement condition or distress
- GPS coordinates
- Panoramic right-of-way video
- Pavement video
- Feature location
|
|
|


Figure 9. The ARAN Integrated Analysis Unit from Roadware.
Summary of Measurement Devices
A summary of the most commonly used roughness data collection devices, their measurement principles, relative costs, relative degrees of accuracy, and current and projected future use is contained in Table 2.
Table 2. Roughness Data Collection Equipment (from FHWA, 1989[4]
| Roughness Data Collection Device | Principle of Measurement | Relative Initial Cost | Relative Data Collection Cost (Network) | Relative Degree of Accuracy | Approximate Decade of Development | Extent of Current Use | Projected Extent of Use |
|---|---|---|---|---|---|---|---|
| Dipstick | Direct Differential Measurement | Low | Impractical | Very High | 1980s | Limited, Used for Calibration | Same as Current Use |
| Profilographs | Direct Profile Recordation | Low | Impractical | Medium | 1960s | Extensive for Const. Acceptance | Same as Current Use |
| BPR Roughometer | Device Response | Low | Low | Medium | 1940s | Limited | None |
| Mays Meter | Vehicle Response | Low | Low | Medium | 1960s | Extensive | Decreasing Continuously |
| South Dakota Road Profiler | Direct Profile Recordation | Medium | Low | High | 1980s | Growing | Rapidly Increasing |
| Contact Profiling Device | Direct Profile Recordation | High | Medium | Very High | 1970s | Limited | Decreasing |
| Non-Contact Profiling Device | Direct Profile Recordation | High | Medium | Very High | 1980s | Medium | Increasing Continuously |
- International Roughness Index. Web page from the Road Roughness Home Page: http://www.umtri.umich.edu/erd/roughness/iri.html). Accessed 4 October 2001.↵
- National Cooperative Highway Research Program Synthesis of Highway Practice 14: Skid Resistance. Highway Research Board, National Academy of Sciences, Washington, D.C.↵
- Relationship Between IRI and PSR. Interim Report for 1991-1992, Report No. UILU-ENG-92-2013. Illinois Department of Transportation. Springfield, IL.↵
- Automated Pavement Condition Data Collection Equipment. Resource Paper contained within the FHWA Pavement Notebook. Pavement Division, Federal Highway Administration. Washington, D.C.↵
- Assessment of Virginia’s Hybrid South Dakota Road Profiling System. Web page: http://www.virginiadot.org/vtrc/main/online_reports/pdf/96-r20.pdf. Accessed 19 September 2001.↵